Atomic Energy Commission robot inspired offshore petroleum industry’s remotely operated vehicles.
Shell Oil and Hughes Aircraft in 1960 began modifying an advanced but landlocked “manipulator operated robot” into one that could operate underwater. The result would lead to revolutionary offshore swimming machines for petroleum exploration and production.
Much of the 21st-century’s offshore oil and natural gas industry has relied on remotely operated vehicles (ROVs) that can trace their roots back to Howard Hughes, Jr. In the late 1950s, Hughes Aircraft created the Manipulator Operated Robot — known as a Mobot — for the Atomic Energy Commission.
Working on land, the robot performed tasks in environments too radioactive for humans. Mobot weighed 4,500 pounds and worked with hydraulically powered steel claws and television eyes. It was linked by a 200-foot cable to the operator, who used pistol grips and levers.
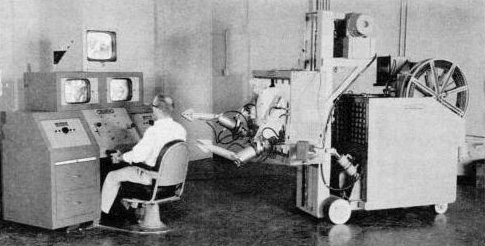
The first “manipulator operated robot” (Mobot) was built for the Atomic Energy Commission to work in a radioactive environment. Photo courtesy September 1960 Popular Mechanics article, “Marvelous Mobot Will Do Work Too Hot For Man.”
In 1960, Popular Science magazine described the advanced technology in “Marvelous Mobot Will Do Work Too Hot For Man.” The article reflected the era’s fascination with science fiction and new technologies.
“With electronic nerves, hydraulic muscles, and TV eyes, a robot whose arms are quite capable of playing golf or snuggling a blonde is ready to live far more dangerously than that,” proclaims the article’s first paragraph. The accompanying photo shows the “murderous impulse” of a wheeled Mobot behind a scientist as he watches three remote camera screens. The caption adds, “Never fear, he (the scientist) has it all under control.”
The offshore petroleum exploration and production industry recognized the potential of technology for a submersible robot with “underwater electronic nerves, hydraulic muscles, and TV eyes.”

Howard Shatto Jr. received a 1965 patent for his “underwater manipulator with suction support device.” He helped make Shell Oil a leader in offshore technology.
As the search for oil reached deeper into the ocean’s depths, traditional hard hat diving technology advanced to keep up. The advent of saturation diving and helium/oxygen mixtures extended depths and diving times.
Deep Wells Offshore
Saturation diving technologies helped reduce the dangers of decompression sickness — “the bends” — but there were limits to what divers could accomplish in increasingly hazardous depths (learn more in Deep Sea Roughnecks).
Shell Oil Company took the lead in transforming Hughes’ Mobot design into what would become known as ROVs. Beginning in 1960, a series of patents described “a remotely controlled manipulator device for carrying out operations underwater at an assembly position at the top of a well.”

Patents by Howard Shatto Jr. — named to the Oilfield Energy Center’s Industry Pioneers Hall of Fame in 2000 — and others made Shell Oil Company the early leader in offshore development. Shatto explained how an underwater device patented in January 1965 particularly related to the offshore petroleum industry:
“A recent development at offshore locations is the installation of a large amount of underwater equipment used in producing oil fields and gas fields situated many miles from shore,” Shatto noted, adding, “Many of the wells are being drilled in water up to 600 feet deep, a depth greater than divers can safely work.”

Howard L. Shatto Jr. (1924-2018) became known as “the father of dynamic positioning,” according to the Marine Technology Society.
The inventor added that a primary objective of his design is to provide a “manipulator device” with articulated arms that can secure itself to a wellhead on the ocean floor. “Each of the arms is provided at its outer end with a suitable suction means in the form of a suction cup,” he explained.
Swimming Socket Wrench
Shatto led in designing of the first subsea wellheads using an ROV, noted the Oilfield Energy Center in 2000. He also conceived automatic controls for dynamic positioning (DP) of a vessel that “controlled surge, sway, and yaw independently and resolved thruster commands.

A Yale graduate, Shatto developed ROVs for the first subsea BOP and created the world’s first automatic DP control for Shell’s Eureka core drillship in 1960, according to the Marine Technology Society.
In 1970, Shatto made industry history with the world’s first DP oil exploration riser-equipped drillship. “Since then, more than 4,000 DP systems have been built worldwide using Mr. Shatto’s initial concepts,” noted Drilling Contractor magazine in 2018 after Shatto, chairman emeritus of the Dynamic Positioning Committee of the Marine Technology Society, died on January 21.
“Known as the father of Dynamic Positioning, Howard Shatto’s contributions to the offshore oil and gas industry and the marine industry as a whole go well beyond DP,” added the Dynamic Positioning Committee.
Making a Mobot
When Hughes Aircraft built the first marine Mobot for Shell Oil, the company adapted sonar and television cameras for navigation, propellers for propulsion, and an umbilical cable for control. With a mechanical arm, the offshore robot could turn bolts, operate valves and attach control hoses and guidelines.

“This mechanical robot has been developed to assist in drilling and completing offshore wells,” noted Shell Oil Company of its new technology that could swim, see, and hear. Photo courtesy National Museum of American History, American Petroleum Institute Collection 1860s-1980s, Archives Center.
“It was basically a swimming socket wrench,” said a Shell engineer, describing the 14-foot, 7,000-pound underwater Mobot. Because of the necessity to pay traditional divers to rescue a clumsy, often entangled offshore robot, early models also became known as “a diver’s best friend.”
A Shell Oil Company Mobot photograph is preserved in the American Petroleum Institute Collection 1860s-1980s, at the National Museum of American History, Archives Center. “This mechanical robot was developed to assist in drilling and completing offshore wells,” notes the undated caption. “The device uses television and sonar to locate wellheads, has a gyrocompass for directional sense, and swims in the water with propellers on either side. Its main tool, a socket wrench, can be replaced with a claw for holding various types of equipment.”
The first job of a revolutionary offshore “mechanical robot” was to complete a well off the coast of California, according to Meccano Magazine, February 1963, page 49.
Shell Oil successfully used a Mobot on a wildcat well in 250 feet of water off the coast of Santa Barbara, California, in October 1962. “It can swim, see, hear and has a ‘nose’ that turn screws, work valves, and grip pipes and hoses,” noted the editor of Meccano Magazine in February 1963, page 49. “It can also wield a wire brush and other tools,” added the editor.
Over the next 10 years, increasingly advanced Mobots worked at dozens of offshore wells, operating to depths of 1,000 feet for extended periods. As exploratory wells continued to be drilled deeper, the technology revolutionized the offshore industry worldwide.
Military Subsea Technology
During the Cold War, the U.S. Navy developed its own deep-sea technology for both submarine rescue and antisubmarine purposes. In 1963, the nuclear attack submarine USS Thresher sank with the loss of all hands 220 miles off the coast of Cape Cod, Mass.
The only vehicle capable of reaching a depth of 8,400 feet was the Navy’s manned bathyscaph Trieste, which found and photographed the wreckage. Unfortunately, Trieste had little capability to retrieve objects.

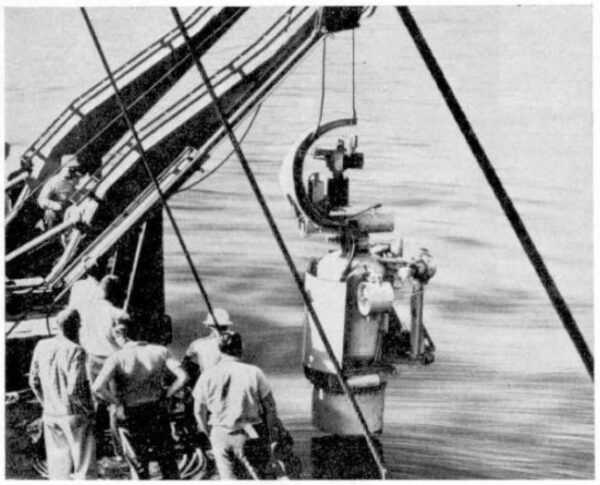
The Navy’s CURV I (Cable-Controlled Underwater Recovery Vehicle) recovers a lost nuclear bomb from the Mediterranean in 1966 near Palomares, Spain.
On January 17, 1966, near the coast of Spain, a U.S. Air Force B-52 collided with its refueling tanker, scattering debris and four 70-kiloton hydrogen bombs over the Spanish coast. Three of the nuclear bombs were recovered on land, but the fourth was lost in the Mediterranean Sea.
With a combination of divers and the Woods Hole Oceanographic Institution’s manned submersible, Alvin, the missing atomic bomb was located at a depth of 2,850 feet. To retrieve it, the Navy employed its new CURV I (Cable-Controlled Underwater Recovery Vehicle), which snagged the bomb and pulled it to the surface.
“It was located and fished up by the most fabulous array of underwater machines ever assembled,” proclaimed Popular Science magazine. During the Cold War, the Navy developed deep-sea technologies that the offshore petroleum industry would adopt and continue to advance.
Worldwide publicity briefly elevated the visibility of marine robotics, but the technology has mostly remained submerged in military, scientific, and offshore oil and natural gas applications.
Secrets of the Titanic
In 1982, Robert Ballard of the Woods Hole Oceanographic Institute — and a former naval intelligence officer — approached the Navy as a possible source of funding to find the wreck of the Titanic.

In 1986, Robert Ballard brought the manned submersible Alvin, above, to the wreck of the Titanic. He also utilized an ROV — a fiber optic “tethered eyeball.”
The Navy was more interested in developing Ballard’s fiber optic video system for deep-sea surveys and the potential to examine debris fields of two nuclear submarines, USS Thresher (lost April 10, 1963) and USS Scorpion (lost May 22, 1968).
With Navy support, the oceanographer’s highly classified mission was presented to the public as only “a search for Titanic.” Ballard used the Argo, a towed undersea video camera sled, to survey and photograph both submarine wrecks, yielding invaluable data to his covert government sponsors.
Completing the secret mission’s objectives with 12 days to spare, Ballard’s team used Argo to find the Titanic on September 1, 1985, and received worldwide acclaim. For 73 years Titanic had remained hidden at a depth of 12,460 feet. One year later, Ballard brought another Woods Hole veteran, deep-diving manned submersible Alvin, to the Titanic.
Then, for the first time, the public was able to see deeper into Titanic’s ghostly decks through the fiber optic eyes of the ROV Jason Jr. Later joined by another unmanned submersible, the Hercules, the two highly sophisticated ROVs brought undersea technology to prime-time television.
Offshore Production
While such “Eyeball Class” ROVs were well suited for marine archeology, observation, and inspection, the demands of deep offshore oil production required development of heavy “Work Class” ROVs that could be equipped with a variety of tools.

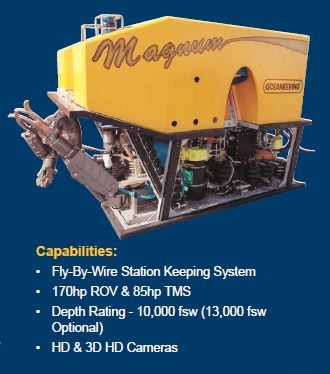
Remotely operated vehicles (ROVs) are most widely used by the offshore petroleum industry. Photo courtesy Oceaneering International.
Today, such an offshore robot can weigh ten thousand pounds, lift over one thousand, and operate at 10,000-foot depths. The petroleum industry is the principal user of this class of ROV. Further offshore exploration is prompting yet a new generation of marine robotics – the Autonomous Underwater Vehicle (AUV) which abandons the use of a physical cable connection to the mother ship.
Fiber optics link data from a 6,750-pound vehicle. Image courtesy Ocean Engineering.
Defined as “a crewless, non-tethered submersible which operates independent of direct human control,” AUVs make detailed maps of seabed topography and hazards that could impact proposed oil and natural gas offshore infrastructure.
Advanced AUVs continue to be an emerging offshore technology that began with Howard Hughes’ simple Mobot at the dawn of the nuclear age (also see Petroleum Survey finds U-166).
_______________________
Recommended Reading: The Offshore Imperative: Shell Oil’s Search for Petroleum in Postwar America

_______________________
The American Oil & Gas Historical Society (AOGHS) preserves U.S. petroleum history. Please support this energy education website, subscribe to a monthly email newsletter, and help expand our historical research. Contact bawells@aoghs.org. Copyright © 2026 Bruce A. Wells. All rights reserved.
Citation Information – Article Title: “ROV – Swimming Socket Wrench.” Authors: B.A. Wells and K.L. Wells. Website Name: American Oil & Gas Historical Society. URL: https://aoghs.org/offshore-history/offshore-robot. Last Updated: April 3, 2026. Original Published Date: January 13, 2011.